A class that combines the forward and inverse kinematics of an arm. More...
#include <ArmKinematics.h>
Public Member Functions | |
| ArmKinematics (std::shared_ptr< const ForwardArmKinematics< D, N > > forwardKin, std::shared_ptr< const InverseArmKinematics< D, N > > inverseKin) | |
| bool | satisfiesConstraints (const navtypes::Vectord< N > &jointPos) const override |
| Check if the given joint configuration is valid. | |
| navtypes::Vectord< N > | getSegLens () const override |
| Get the segment lengths for this arm. | |
| navtypes::Vectord< D > | jointPosToEEPos (const navtypes::Vectord< N > &jointPos) const override |
| Given a joint position, calculate the current EE position. | |
| navtypes::Matrixd< D, N > | getJacobian (const navtypes::Vectord< N > &jointPos) const override |
| Get the jacobian matrix for the arm at the given joint angles. | |
 Public Member Functions inherited from kinematics::ForwardArmKinematics< D, N > Public Member Functions inherited from kinematics::ForwardArmKinematics< D, N > | |
| constexpr unsigned int | getNumSegments () const |
| Get the number of segments in this arm. | |
| constexpr unsigned int | getNumDimensions () const |
| Get the number of dimensions of the end effector space. | |
| navtypes::Vectord< D > | jointVelToEEVel (const navtypes::Vectord< N > &jointPos, const navtypes::Vectord< N > &jointVel) const |
| Calculate the EE velocity. | |
| navtypes::Vectord< N > | eeVelToJointVel (const navtypes::Vectord< N > &jointPos, const Eigen::Vector2d &eeVel) const |
| Calculates the joint velocity that yields the desired EE velocity. | |
| Public Member Functions inherited from kinematics::InverseArmKinematics< D, N > | |
| InverseArmKinematics (std::shared_ptr< const ForwardArmKinematics< D, N > > fk) | |
| Construct an IK object. | |
| navtypes::Vectord< N > | eePosToJointPos (const navtypes::Vectord< D > &eePos, const navtypes::Vectord< N > &currJointPos) const |
| Calculate the joint angles that yield the desired EE position. | |
| virtual navtypes::Vectord< N > | eePosToJointPos (const navtypes::Vectord< D > &eePos, const navtypes::Vectord< N > &jointAngles, bool &success) const |
| Solve for the joint angles that yield the given EE position. | |
Protected Member Functions | |
| navtypes::Vectord< N > | solve (const navtypes::Vectord< D > &eePos, const navtypes::Vectord< N > &jointAngles, bool &success) const override |
| Solve for the joint angles that yield the given EE position. | |
Additional Inherited Members | |
| Protected Attributes inherited from kinematics::InverseArmKinematics< D, N > | |
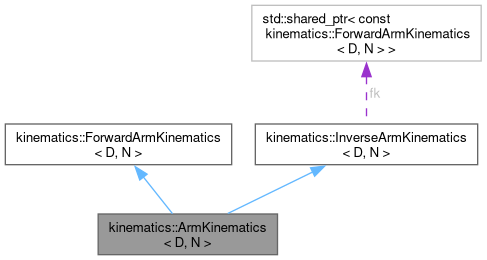
| const std::shared_ptr< const ForwardArmKinematics< D, N > > | fk |
Detailed Description
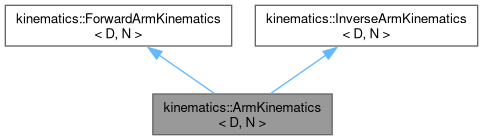
class kinematics::ArmKinematics< D, N >
A class that combines the forward and inverse kinematics of an arm.
- Template Parameters
-
D The number of dimensions of the end effector space. N The number of joints in the arm.
Member Function Documentation
◆ getJacobian()
|
inlineoverridevirtual |
Get the jacobian matrix for the arm at the given joint angles.
- Parameters
-
jointPos The joint angles of the arm.
- Returns
- navtypes::Matrixd<D, N> The jacobian matrix at the point.
Implements kinematics::ForwardArmKinematics< D, N >.
◆ getSegLens()
|
inlineoverridevirtual |
Get the segment lengths for this arm.
- Returns
- The vector of segment lengths
Implements kinematics::ForwardArmKinematics< D, N >.
◆ jointPosToEEPos()
|
inlineoverridevirtual |
Given a joint position, calculate the current EE position.
- Parameters
-
jointPos Current joint position.
- Returns
- navtypes::Vectord<D> The EE position.
Implements kinematics::ForwardArmKinematics< D, N >.
◆ satisfiesConstraints()
|
inlineoverridevirtual |
Check if the given joint configuration is valid.
- Parameters
-
jointPos The joint positions to check.
- Returns
- true iff the joint configuration is valid, false otherwise.
Implements kinematics::ForwardArmKinematics< D, N >.
◆ solve()
|
inlineoverrideprotectedvirtual |
Solve for the joint angles that yield the given EE position.
This method does not need to verify that the solution verifies the FK constraints, or if the target position is within the arm's reach.
- Parameters
-
eePos The desired end effector position. currJointPos The current joint angles. Used as a starting guess for the IK solver. [out] success Output parameter that signals if the IK solver succeeded. Failure may occur if the target is unreachable or the IK solver exceeds the iteration limit.
- Returns
- navtypes::Vectord<N> The target joint angles that achieve the desired EE position.
Implements kinematics::InverseArmKinematics< D, N >.
The documentation for this class was generated from the following file:
- src/kinematics/ArmKinematics.h
Generated by