Base class for Kalman Filters. More...
#include <KalmanFilterBase.h>

Public Member Functions | |
| virtual void | predict (const Eigen::Matrix< double, inputDim, 1 > &input)=0 |
| Use the model to predict the next system state, given the current inputs. | |
| void | reset () |
| Reset the filter. | |
| void | reset (const Eigen::Matrix< double, stateDim, 1 > &state) |
| Reset the filter. | |
| void | reset (const Eigen::Matrix< double, stateDim, 1 > &state, const Eigen::Matrix< double, stateDim, 1 > &stdDevs) |
| Reset the filter. | |
| void | reset (const Eigen::Matrix< double, stateDim, 1 > &state, const Eigen::Matrix< double, stateDim, stateDim > &estCovMat) |
| Reset the filter. | |
| Eigen::Matrix< double, stateDim, 1 > | getState () const |
| Gets the current state estimate. | |
| Eigen::Matrix< double, stateDim, stateDim > | getEstimateCovarianceMat () const |
| Get the current estimate covariance matrix. | |
Protected Attributes | |
| Eigen::Matrix< double, stateDim, stateDim > | P |
| Eigen::Matrix< double, stateDim, 1 > | xHat |
Detailed Description
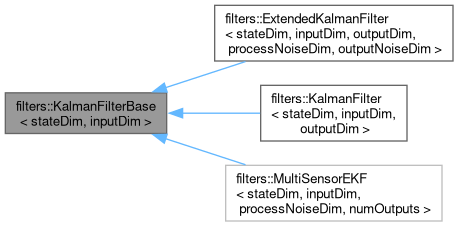
class filters::KalmanFilterBase< stateDim, inputDim >
Base class for Kalman Filters.
- Template Parameters
-
stateDim The dimension of the state vector. inputDim The dimension of the input vector, or system actions.
Member Function Documentation
◆ getEstimateCovarianceMat()
|
inline |
Get the current estimate covariance matrix.
This is an indication of the uncertainty of the pose estimate.
- Returns
- The estimate covariance matrix, AKA the P matrix.
◆ getState()
|
inline |
Gets the current state estimate.
- Returns
- The state estimate.
◆ predict()
|
pure virtual |
Use the model to predict the next system state, given the current inputs.
- Parameters
-
input The current inputs to the system.
Implemented in filters::ExtendedKalmanFilter< stateDim, inputDim, outputDim, processNoiseDim, outputNoiseDim >, and filters::KalmanFilter< stateDim, inputDim, outputDim >.
◆ reset() [1/4]
|
inline |
Reset the filter.
Sets the state estimate to the zero vector and resets the estimate covariance matrix to a diagonal matrix with large values.
◆ reset() [2/4]
|
inline |
Reset the filter.
Sets the state estimate to the supplied vector and resets the estimate covariance matrix to a diagonal matrix with large values.
- Parameters
-
state The state to which the state estimate will be set.
◆ reset() [3/4]
|
inline |
Reset the filter.
Sets the state estimate to the supplied vector with the given uncertainty.
- Parameters
-
state The state to set the vector to. stdDevs The standard deviation of the measurement of each element in the state vector. This should not be the zero vector. If you want to represent high certainty, use very small values instead.
◆ reset() [4/4]
|
inline |
Reset the filter.
Sets the state estimate to the supplied vector and the estimate covariance matrix to the supplied matrix.
- Parameters
-
state The state to set the vector to. estCovMat The matrix to set the estimate covariance matrix to. This should not be the zero matrix. If you want to represent high certainty, use a diagonal matrix with very small values.
The documentation for this class was generated from the following file:
- src/filters/KalmanFilterBase.h
Generated by